Fully-distributed optimization using a uniform first guess#
To get started, open a Python interface:
python3
Imports#
In [1]: import smash
In [2]: import matplotlib.pyplot as plt
In [3]: import numpy as np
Model object creation#
To perform the calibrations, you need to create a smash.Model object.
For this case, we will use the Lez dataset.
Load the setup and mesh dictionaries using the smash.load_dataset() method and create the smash.Model object.
In [4]: setup, mesh = smash.load_dataset("Lez")
In [5]: model = smash.Model(setup, mesh)
Spatially uniform optimization#
To find the uniform first guess, we can perform a spatially-uniform calibration using global optimization algorithms. Here’s an example how we can do it with the \(\mathrm{SBS}\) algorithm:
In [6]: model_su = model.optimize(mapping="uniform", algorithm="sbs", options={"maxiter": 2});
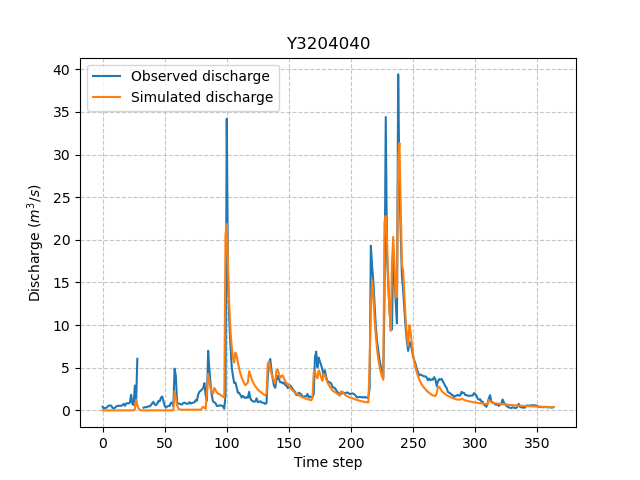
Once the optimization is complete. We can visualize the simulated discharge:
In [7]: qo = model_su.input_data.qobs[0,:].copy()
In [8]: qo = np.where(qo<0, np.nan, qo) # to deal with missing data
In [9]: plt.plot(qo, label="Observed discharge");
In [10]: plt.plot(model_su.output.qsim[0,:], label="Simulated discharge");
In [11]: plt.grid(alpha=.7, ls="--");
In [12]: plt.xlabel("Time step");
In [13]: plt.ylabel("Discharge $(m^3/s)$");
In [14]: plt.title(model_su.mesh.code[0]);
In [15]: plt.legend();
The cost function value \(J\):
In [16]: model_su.output.cost
Out[16]: 0.17609025537967682
And the spatially uniform first guess:
In [17]: ind = tuple(model_su.mesh.gauge_pos[0,:])
In [18]: ind
Out[18]: (26, 12)
In [19]: (
....: model_su.parameters.cp[ind],
....: model_su.parameters.cft[ind],
....: model_su.parameters.exc[ind],
....: model_su.parameters.lr[ind],
....: )
....:
Out[19]: (55.60748, 139.0187, 1.6593012, 431.59668)
Hint
You may want to refer to the Bayesian estimation section for information on how to improve the first guess using a Bayesian estimation approach.
Spatially distributed optimization#
Next, using the first guess provided by a global calibration, which had stored the optimized parameters in the previous step, we perform a spatially distributed calibration using the \(\mathrm{L}\text{-}\mathrm{BFGS}\text{-}\mathrm{B}\) algorithm:
In [20]: model_sd = model_su.optimize(
....: mapping="distributed",
....: algorithm="l-bfgs-b",
....: options={"maxiter": 30}
....: )
....:
We can once again visualize, the simulated discharges (su: spatially uniform, sd: spatially distributed):
In [21]: qo = model_sd.input_data.qobs[0,:].copy()
In [22]: qo = np.where(qo<0, np.nan, qo) # to deal with missing data
In [23]: plt.plot(qo, label="Observed discharge");
In [24]: plt.plot(model_su.output.qsim[0,:], label="Simulated discharge - su");
In [25]: plt.plot(model_sd.output.qsim[0,:], label="Simulated discharge - sd");
In [26]: plt.grid(alpha=.7, ls="--");
In [27]: plt.xlabel("Time step");
In [28]: plt.ylabel("Discharge $(m^3/s)$");
In [29]: plt.title(model_sd.mesh.code[0]);
In [30]: plt.legend();
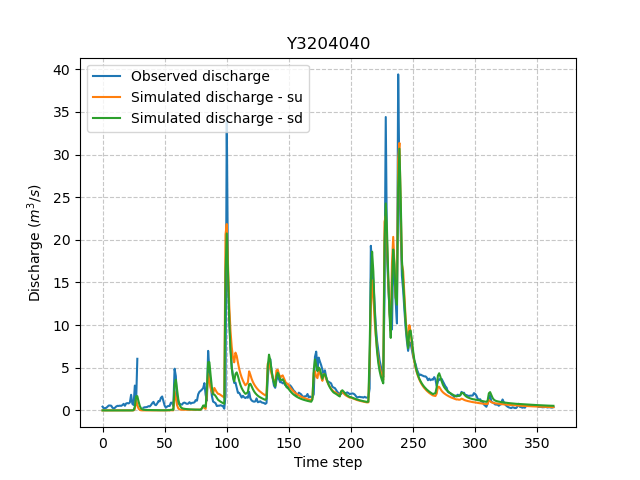
The cost value:
In [31]: model_sd.output.cost
Out[31]: 0.13125108182430267
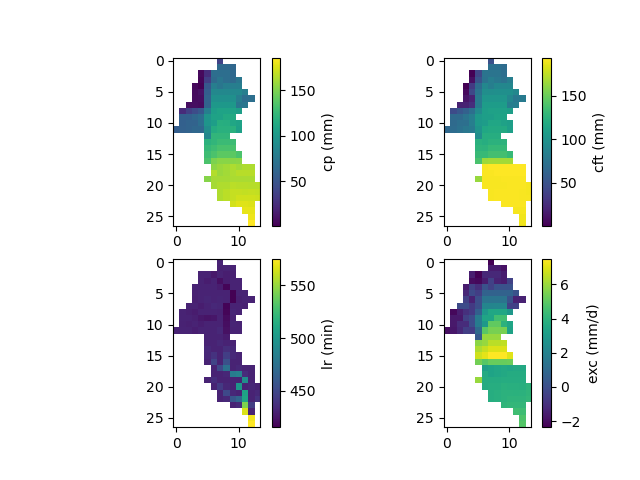
And finally, the distributed model parameters in this case:
In [32]: ma = (model_sd.mesh.active_cell == 0)
In [33]: ma_cp = np.where(ma, np.nan, model_sd.parameters.cp)
In [34]: ma_cft = np.where(ma, np.nan, model_sd.parameters.cft)
In [35]: ma_lr = np.where(ma, np.nan, model_sd.parameters.lr)
In [36]: ma_exc = np.where(ma, np.nan, model_sd.parameters.exc)
In [37]: f, ax = plt.subplots(2, 2)
In [38]: map_cp = ax[0,0].imshow(ma_cp);
In [39]: f.colorbar(map_cp, ax=ax[0,0], label="cp (mm)");
In [40]: map_cft = ax[0,1].imshow(ma_cft);
In [41]: f.colorbar(map_cft, ax=ax[0,1], label="cft (mm)");
In [42]: map_lr = ax[1,0].imshow(ma_lr);
In [43]: f.colorbar(map_lr, ax=ax[1,0], label="lr (min)");
In [44]: map_exc = ax[1,1].imshow(ma_exc);
In [45]: f.colorbar(map_exc, ax=ax[1,1], label="exc (mm/d)");