Hybrid Process-Parameterization with Neural Networks#
The process-parameterization neural networks are integrated into smash for GR-like model structures, either within algebraic models solving analytical solutions of time-integrated ordinary differential equations (ODEs), or within state-space models that numerically solve the ODEs.
The later is referred to as universal differential equations (UDEs), with state-dependent neural networks embedded into the ODEs.
These networks are used to refine internal water fluxes in hydrological models using a multilayer perceptron (MLP) based on the original hydrological model.
For example, the model structure gr4_mlp is used to embed an MLP into the original gr4 model, while the structure gr4_ude embeds UDEs into the original continuous state-space gr4_ode model.
Please refer to the description of Hydrological Operators for mathematical details on different model structures.
For simplicity, we will only refer to the gr4_mlp structure in this tutorial, but the same principles apply to the other hybrid structures.
We begin by opening a Python interface:
python3
Imports#
We will first import the necessary libraries for this tutorial.
>>> import smash
>>> import numpy as np
>>> import matplotlib.pyplot as plt
Model creation#
Now, we need to create a smash.Model object.
For this case, we will use the Lez dataset as an example.
Load the setup and mesh dictionaries using the smash.factory.load_dataset function.
>>> setup, mesh = smash.factory.load_dataset("Lez")
The hydrological model structure and the architecture of the process-parameterization neural network are defined in the setup dictionary.
>>> setup["hydrological_module"] = "gr4_mlp"
>>> setup["hidden_neuron"] = 12 # 1 hidden layer with 12 neurons. Use a tuple for 2 hidden layers.
The MLP architecture is configured via the hidden_neuron key.
To define a single hidden layer, use an integer representing the number of neurons.
To define two hidden layers, use a tuple of two integers, where each value specifies the number of neurons in the corresponding layer.
A maximum of two hidden layers is supported.
Note
The activation functions are not user-configurable.
They are fixed to SiLU for the hidden layer(s) and TanH for the output layer.
The SiLU function is twice differentiable everywhere and provides smooth gradients, ensuring numerical stability during optimization,
particularly when integrating UDEs (refer to the description of the gr4_ude structure in Hydrological Operators).
Now, we create the smash.Model object using the setup and mesh dictionaries.
>>> model = smash.Model(setup, mesh)
By default, the weights and biases of the MLP are initialized to zeros, making the hybrid structure equivalent to the original GR-like model.
>>> model.get_nn_parameters_weight()
[array([[0., 0., 0., 0.],
[0., 0., 0., 0.],
[0., 0., 0., 0.],
[0., 0., 0., 0.],
[0., 0., 0., 0.],
[0., 0., 0., 0.],
[0., 0., 0., 0.],
[0., 0., 0., 0.],
[0., 0., 0., 0.],
[0., 0., 0., 0.],
[0., 0., 0., 0.],
[0., 0., 0., 0.]], dtype=float32), array([[0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0., 0.]], dtype=float32)]
Pre-calibration#
Before training the process-parameterization network, it is highly recommended to perform a pre-calibration step to estimate only the conceptual parameters and/or initial states of the original GR-like model. This helps prevent increased identifiability issues that may arise at this stage when using the process-parameterization network. This step includes pre-calibrating the hydrological parameters (in the case of a uniform or distributed mapping) or pre-training the parameters of the descriptors-to-parameters mapping (in the case of regionalization). For simplicity, we will use the uniform mapping in this example.
By default of this model structure, the parameters that will be calibrated include the weights and biases of the MLP, as well as the parameters of the original GR-like model.
>>> optimize_options = smash.default_optimize_options(model)
>>> optimize_options["parameters"]
['cp', 'ct', 'kexc', 'llr', 'weight_1', 'bias_1', 'weight_2', 'bias_2']
Then, the weights and biases can be excluded from calibration at this stage:
>>> optimize_options["parameters"] = [p for p in optimize_options["parameters"] if "weight" not in p and "bias" not in p]
>>> optimize_options["parameters"]
['cp', 'ct', 'kexc', 'llr']
Pre-calibrate the model using the default SBS optimizer with a small number of iterations:
>>> optimize_options["termination_crit"]["maxiter"] = 2
>>> model.optimize(optimize_options=optimize_options)
</> Optimize
At iterate 0 nfg = 1 J = 6.85771e-01 ddx = 0.64
At iterate 1 nfg = 30 J = 3.51670e-01 ddx = 0.64
At iterate 2 nfg = 58 J = 1.80573e-01 ddx = 0.32
STOP: TOTAL NO. of ITERATIONS REACHED LIMIT
Note
You may see a warning such as “sbs optimizer may not be suitable for the gr4_mlp module…” because the SBS optimizer is generally not well-suited for high-dimensional optimization in hybrid process-parameterization models. However, since the neural network parameters have been excluded from calibration in this step, this warning can be safely ignored.
Weights initialization#
After pre-calibrating the conceptual model parameters, the MLP weights should be initialized with small values to ensure a limited hybridization effect, preserving model behavior close to the original structure at the beginning of training. The weights and biases of the MLP can be initialized either by manually setting their values or by using an automatic initialization method. Here, we use the latter approach:
>>> # Initialize using He uniform method
>>> model.set_nn_parameters_weight(initializer="he_uniform", random_state=23)
>>> # Reduce the weights and biases to a small value
>>> model.set_nn_parameters_weight([w*0.1 for w in model.get_nn_parameters_weight()])
Main training#
Now we proceed to the main training of the process-parameterization neural network, jointly estimating the neural network weights and the hydrological parameters.
Various gradient-based optimizers available in smash are suitable for this stage.
In this example, we use the L-BFGS-B optimizer:
>>> model.optimize(optimizer="lbfgsb")
</> Optimize
At iterate 0 nfg = 1 J = 2.45918e-01 |proj g| = 1.69959e+00
At iterate 1 nfg = 4 J = 1.90550e-01 |proj g| = 4.10054e-01
At iterate 2 nfg = 5 J = 1.80142e-01 |proj g| = 4.18718e-01
...
At iterate 98 nfg = 118 J = 1.36854e-01 |proj g| = 1.10897e-01
At iterate 99 nfg = 120 J = 1.36791e-01 |proj g| = 9.63801e-02
At iterate 100 nfg = 122 J = 1.36720e-01 |proj g| = 1.22952e-01
STOP: TOTAL NO. of ITERATIONS REACHED LIMIT
Comparison with the original model#
It is now interesting to observe how the hybrid model alters the state dynamics compared to the original model—illustrating the hybridization effect.
We start by creating the original model, and running a forward simulation with returned model states:
>>> model_org = model.copy()
>>> model_org.set_nn_parameters_weight(initializer="zeros")
>>> model_org.set_nn_parameters_bias(initializer="zeros")
>>>
>>> ret_org = model_org.forward_run(return_options={"rr_states": True})
Next, get the states of the hybrid model:
>>> ret_hyb = model.forward_run(return_options={"rr_states": True})
Get the production and transfer states from both models at the outlet pixel:
>>> x, y = model.mesh.gauge_pos[2] # position of the most downstream gauge
>>> # Get the production state for the original model
>>> hp_org = np.array([i.values[x, y, 1] for i in ret_org.rr_states])
>>> # Get the production state for the hybrid model
>>> hp_hyb = np.array([i.values[x, y, 1] for i in ret_hyb.rr_states])
>>> # Get the transfer state for the original model
>>> ht_org = np.array([i.values[x, y, 2] for i in ret_org.rr_states])
>>> # Get the transfer state for the hybrid model
>>> ht_hyb = np.array([i.values[x, y, 2] for i in ret_hyb.rr_states])
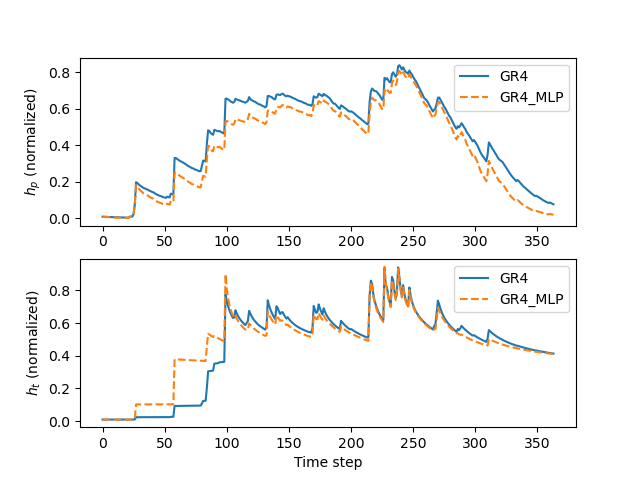
Finally, we can plot the normalized (by related reservoir capacities) states of the production (\(h_p\)) and transfer (\(h_t\)) reservoirs for both the original and hybrid models:
>>> fig, axs = plt.subplots(2, 1)
>>>
>>> axs[0].plot(hp_org, label="GR4")
>>> axs[0].plot(hp_hyb, label="GR4_MLP", linestyle="--")
>>> axs[0].set_ylabel(r"$h_p$ (normalized)")
>>> axs[0].legend()
>>>
>>> axs[1].plot(ht_org, label="GR4")
>>> axs[1].plot(ht_hyb, label="GR4_MLP", linestyle="--")
>>> axs[1].set_ylabel(r"$h_t$ (normalized)")
>>> axs[1].set_xlabel("Time step")
>>> axs[1].legend()
>>>
>>> plt.show()